You are viewing an old version of this page. View the current version.
Compare with Current
View Page History
Version 1
Next »
Use this template to submit Use Cases for submission to the 5G Super Blueprint Use Case & Requirements Advisory Group. All input is required unless marked "(optional)"
| Use Case Name: | Factory Floor Visual Inspection |
|---|
| Use Case Description: | demonstrate a factory floor visual inspection Use Case with hard hat and facemask detection using static transport slicing. Leverage the existing 5G SBP using Free5GC + ONAP + EMCO + Kaloom UPF + GenXComm RAN + IBM visual inspection models and AI software + Aarna AMCOP + A10 FW |
| Problem Statement and how is the problem solved: | Problem Statement: Ensure safety on a factory floor Solution: Automated end-to-end solution with AI that detects and alerts when hard hat and/or facemask is not being worn by an individual. |
Users Stories | - Worker A enters an area of the factory floor where hard hats are required. Worker A IS wearing a hard hat. The system detects that Worker A IS wearing a hard hat and responds with action A.
- Worker B enters an area of the factory floor where hard hats are required. Worker B is NOT wearing a hard hat. The system detects that Worker B is NOT wearing a hard hat and responds with action B.
- Worker C enters an area of the factory floor where facemasks are required. Worker C IS wearing a facemask. The system detects that Worker C IS wearing a facemask and responds with action C.
- Worker D enters an area of the factory floor where facemasks are required. Worker D is NOT wearing a facemask. The system detects that Worker D is NOT wearing a facemask and responds with action D.
|
| Goals and Requirements | Mandatory Goals: - Demonstrable Proof of Concept End to End system demonstrating:
- Hard Hat detection
- Facemask detection
- Static Transport Slicing
- Video shot in the lab depicting mandatory goals above.
- Slideware
- Build Guide
Need to sort out which goals below are attainable, which are stretch, which are roadmap Attainable/Stretch/Roadmap Goals (in addtion to above): - "Live" demo at the ONE Summit venue. The blue box in the lower left in the below lab diagram is setup at the venue in Seattle and demonstrated live.
- Massive IoT simulation. A massive IoT simulator (open source preferred) is used to demostrate scalability of the system.
- Remote Attestation (Peraton Labs) - authenication of IoT devices (cameras).
|
Demo Storyline (optional) |
|
Interaction with other open source projects and components | - Free 5GC
- ONAP
- EMCO
- Aarna AMCOP
- A10 Firewall
|
Links to existing documentation (Build Guide, Slideware, etc), if available (optional). | Lab data flow: 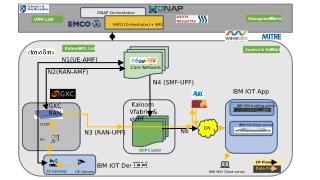
|
Links to existing demo/video, if available (optional). |
|
Links to existing code/repos, if available (optional). |
|